|
Simbody
3.4 (development)
|
|
Simbody
3.4 (development)
|
Derive a concrete class from this one if you have a set of functions (i.e., a vector-valued function) of multiple variables that you want to differentiate. More...
#include <Differentiator.h>
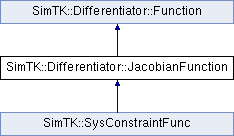
 Inheritance diagram for SimTK::Differentiator::JacobianFunction:
Inheritance diagram for SimTK::Differentiator::JacobianFunction:Public Member Functions | |
| virtual int | f (const Vector &y, Vector &fy) const =0 |
Protected Member Functions | |
| JacobianFunction (int nf=-1, int ny=-1, Real acc=-1) | |
| virtual | ~JacobianFunction () |
Derive a concrete class from this one if you have a set of functions (i.e., a vector-valued function) of multiple variables that you want to differentiate.
This is the typical form for a multibody system, for example.
| SimTK::Differentiator::JacobianFunction::JacobianFunction | ( | int | nf = -1, |
| int | ny = -1, |
||
| Real | acc = -1 |
||
| ) | [explicit, protected] |
| virtual SimTK::Differentiator::JacobianFunction::~JacobianFunction | ( | ) | [inline, protected, virtual] |
| virtual int SimTK::Differentiator::JacobianFunction::f | ( | const Vector & | y, |
| Vector & | fy | ||
| ) | const [pure virtual] |
Implemented in SimTK::SysConstraintFunc.
 1.7.6.1
1.7.6.1